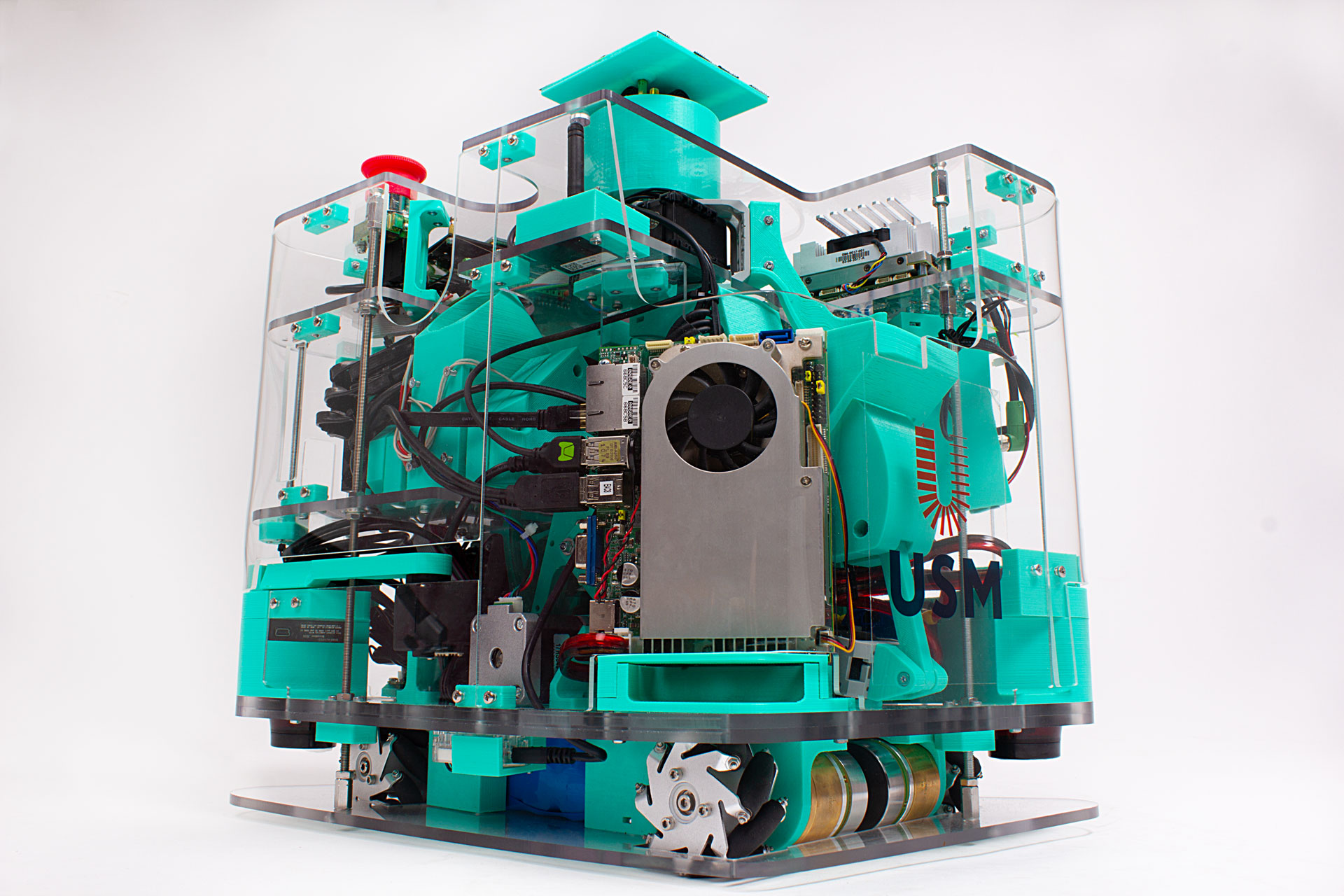

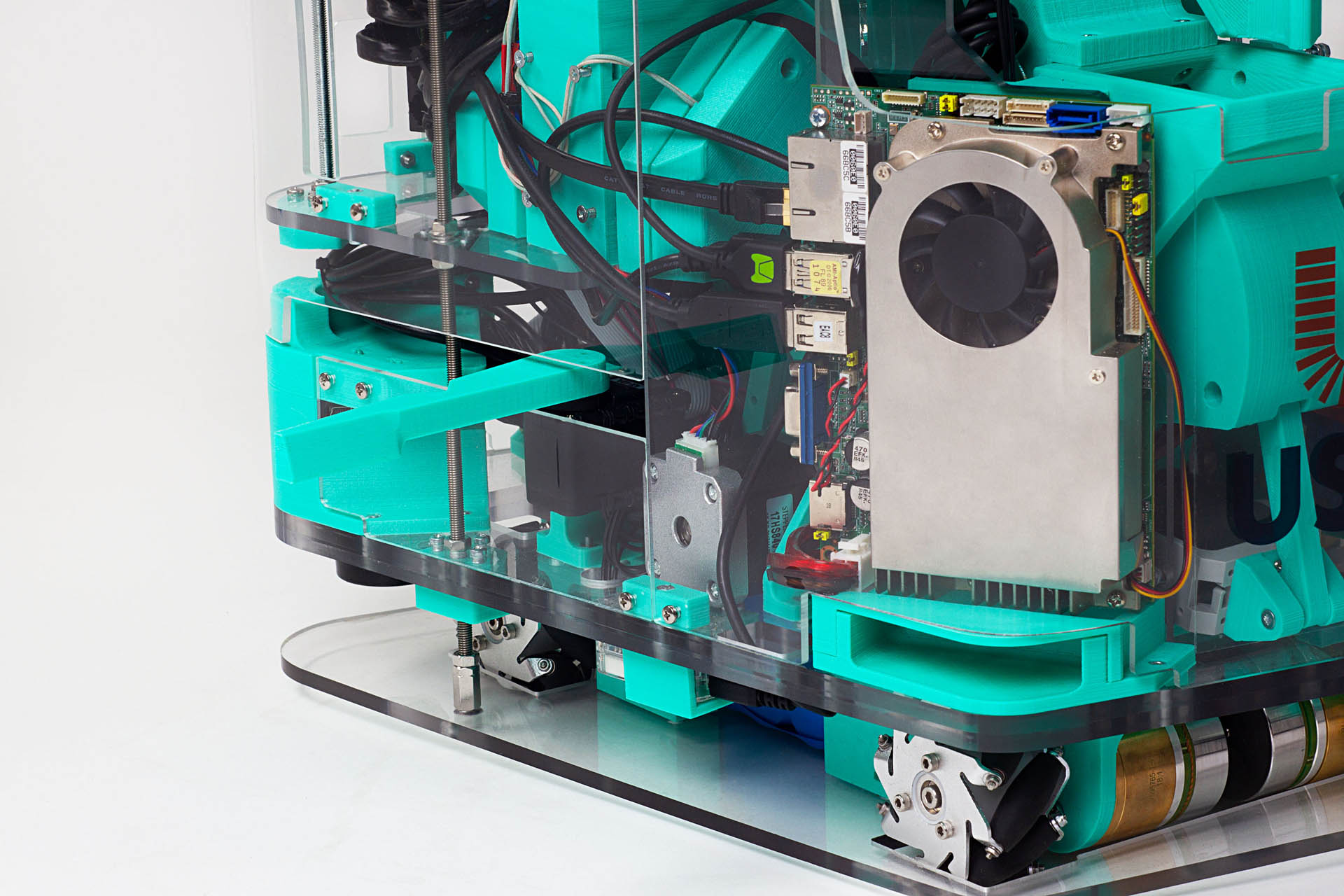
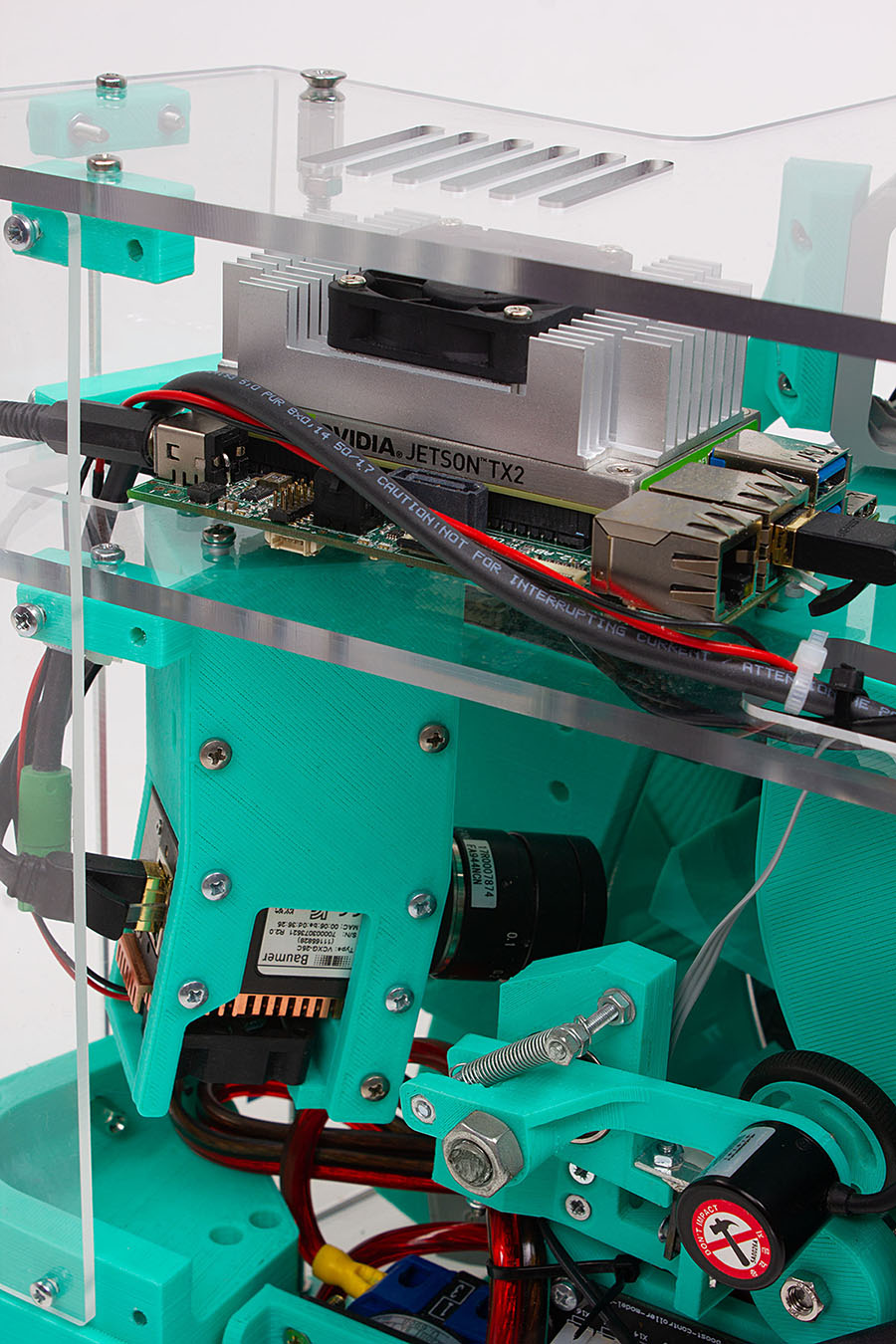
The robot machine vision system is used to detect and sort balls taken from the water recuperator. It is based on Jetson TX2 with Baumer VCXG-25C industrial camera. Jetson is an AI supercomputer on a module, powered by NVIDIA Pascal architecture. It packs this performance into a small form factor that is ideal for robots and other intelligent edge devices.
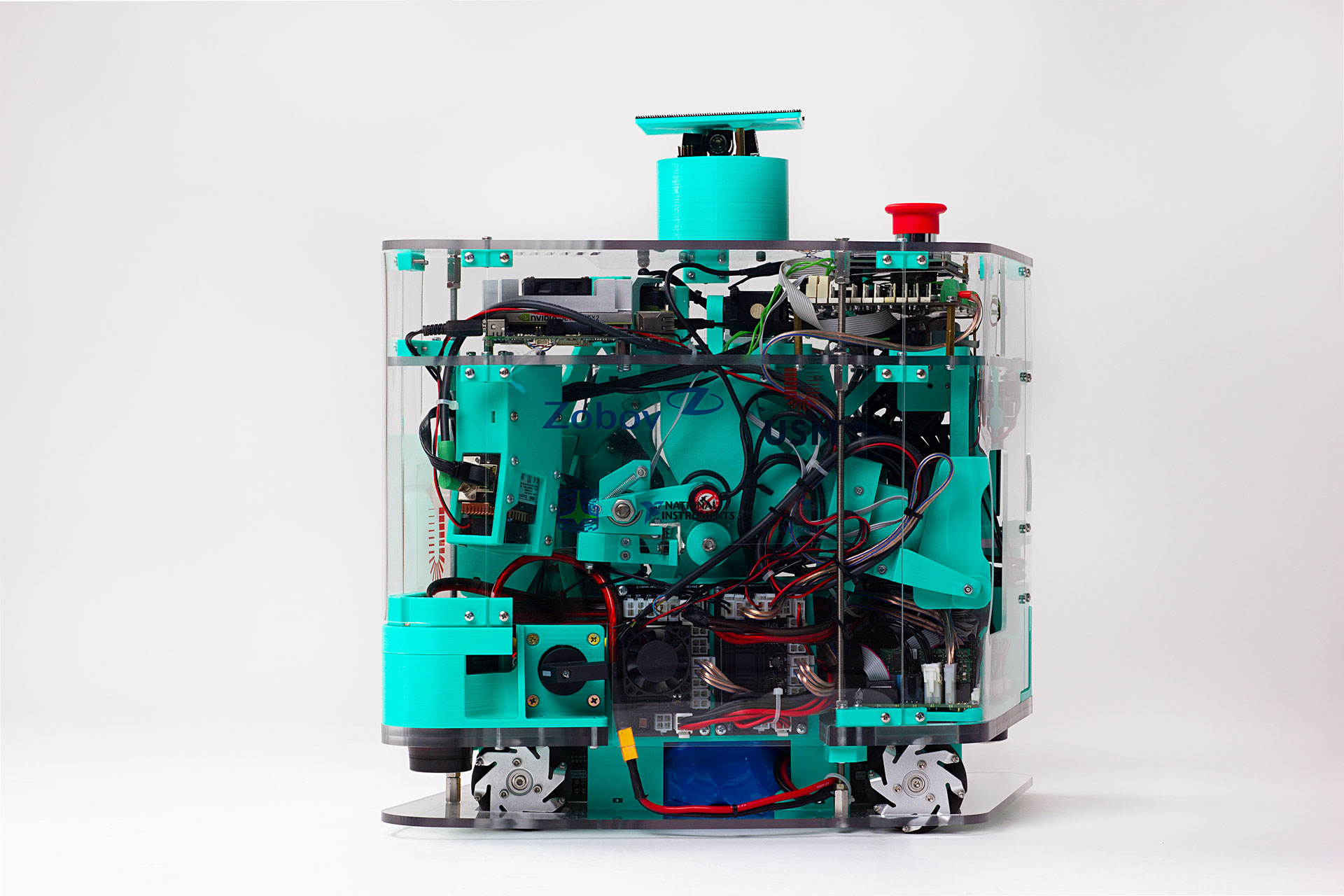
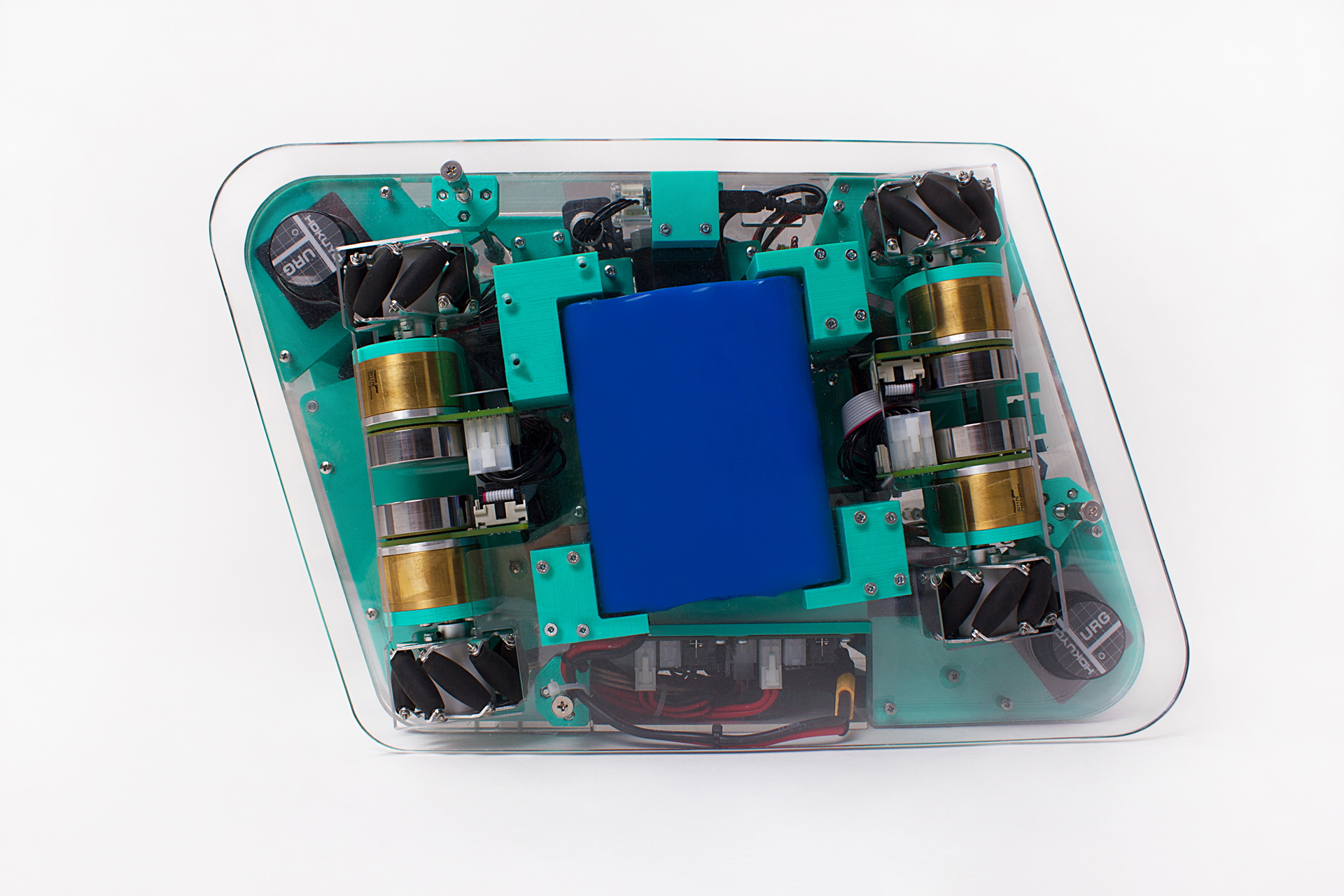
Zobov Mecanum Mobile Robot model 1
Size and Weight
Dimensions
400 x 320 x 350 mm
Mass
12 kg
Speed and Perfomance
Payload
5 kg
Turning radius
0 mm
Maximum Speed
1.0 m/s
Suspension
Fixed
Positional Accurancy
+/- 5 mm
Battery and Power System
Battery Run Time
40 minutes
Charge:Run Ratio
1:4
Sensors and Interfacing
LIDAR
Hokyuo scanning laser rangefinders front and back scanners provides 360° vision and sends data to the localization engine.
Ultrasonic
The ultrasonic navigation system for path planning and collision avoidance.
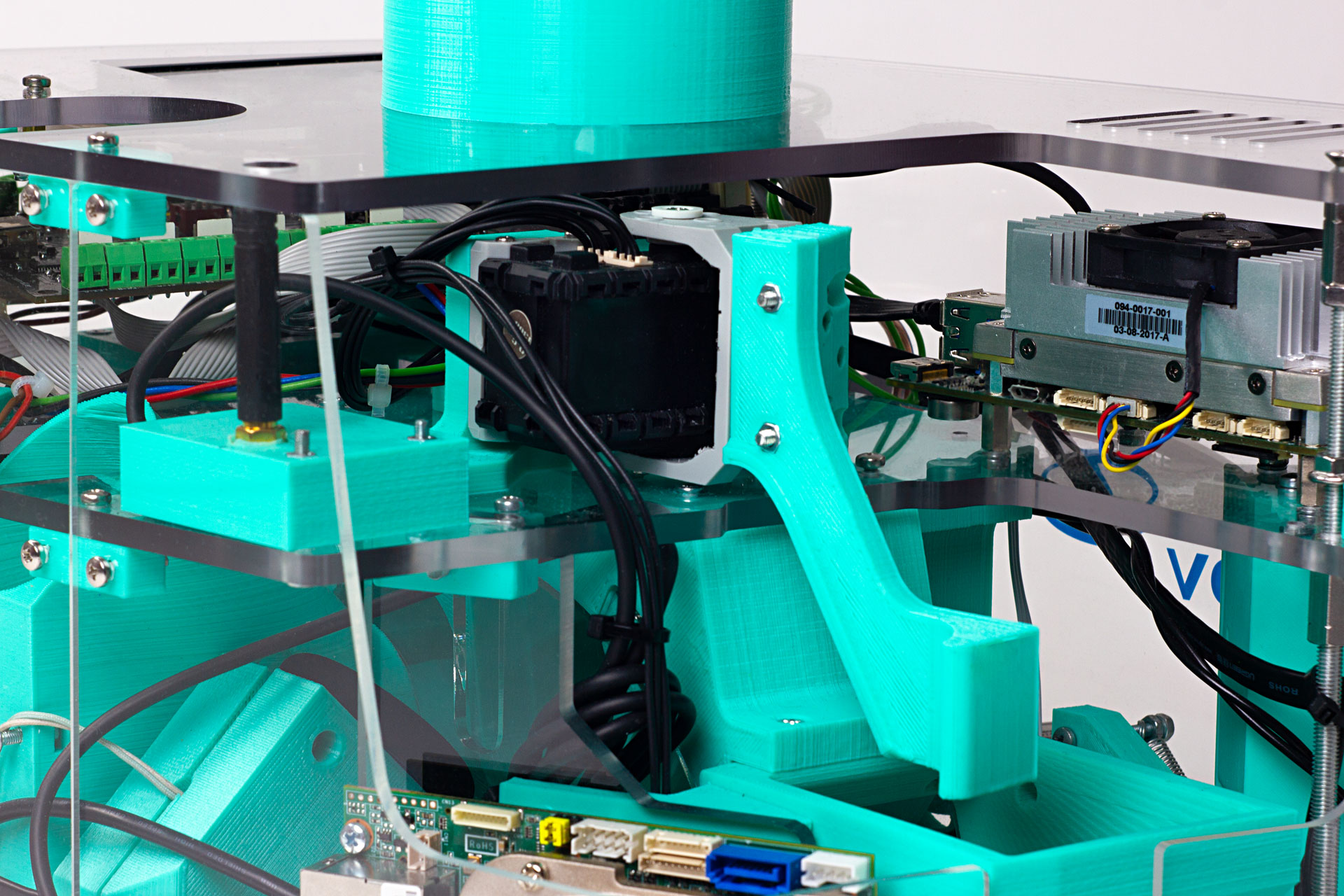
Interfacing
1Gb Ethernet
